|

|
|
|
|
Design
|
|
Différentes études de design ont été
réalisées permettant de mieux cerner les applications possibles du concept
(véhicule urbain, sportif, grand tourisme etc...).
|
|

|
|
|
|
Prototype PU02
|
|
Ce prototype bénéficie des solutions techniques
mises au point sur LA01 en matière de contrôle d'inclinaison. Il est doté
d'une suspension inédite, à biellettes et basculeurs, et emprunte, tout comme
PU01, une architecture moto. Testé (et approuvé!)
par le multiple champion du Monde d'Enduro et spécialiste de Supermotard, Laurent Pidoux, PU02 a démontré tout le
potentiel que peut offrir un TTW dans les domaines du comportement, de la
maniabilité et du plaisir de conduire!...
|
|
|
|
Prototype
LA01
|
|
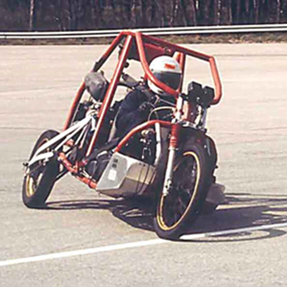
Ce laboratoire roulant n'a pas de
prétentions en matière de design (!) mais présente de larges possibilités d'évolution.
Le châssis-cage, constitué de tubes de forte section, offre une protection
efficace et permet d'envisager les essais les plus extrêmes avec sérénité.
Le groupe moto-propulseur
automobile présente l'intérêt de pouvoir disposer d'un différentiel, d'une
marche arrière et d'une source de puissance hydraulique.
Les commandes de vitesses,
d'accélérateur, de frein et d'embrayage sont également empruntées à
l'automobile.
La suspension arrière est composée de
deux bras en acier. Les combinés oléo-pneumatiques Fournales assurent la fonction suspension. Ils sont
disposés entre les bras et les extrémités d'un balancier dont l'axe de
rotation se situe dans le plan de symétrie longitudinal du véhicule. La
rotation de cette pièce provoque un mouvement en "lames de ciseaux"
des deux bras, et donc la montée d'une roue par rapport à l'autre et, par
suite, la mise en roulis de l'engin. La rotation du balancier est commandée
par le déplacement d'un vérin hydraulique alimenté par une pompe entraînée
par le moteur. Son débit est contrôlé par un organe de distribution dont la
position est fonction de la volonté du conducteur.
Celui-ci dispose au guidon d'une
commande lui permettant, sans effort et par une démarche naturelle, de
provoquer l'inclinaison à droite ou à gauche et une mise en trajectoire
correspondante. Au-dessus de 20 km/h, ce véhicule peut se conduire uniquement
grâce à cette commande d'inclinaison, ce qui apporte confort (conduite sans
effort physique) et sécurité (réflexes naturels). En dessous de cette
vitesse, l'inclinaison est limitée à quelques degrés grâce à un système
électronique.
|
|
|
|
|
Prototype
PU01
|
|
|
Réalisé à partir d'une moto de série, PU01
a été le premier prototype roulant. Un système totalement mécanique permet
d'en contrôler l'inclinaison. Malgré toutes ses imperfections, dues notamment
à la difficulté de réaliser un ensemble homogène à partir d'une base
existante, il a permis de valider le concept et de définir le cahier des
charges du prototype suivant: LA01.
|
|
|

|
|
|
    
|
|
|
|
|
|
|
|
|
|
|
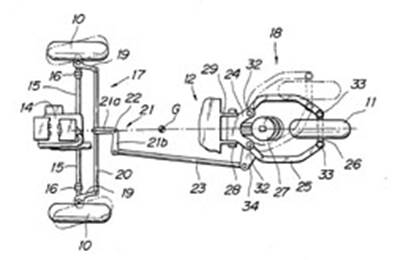
Si l'on excepte quelques
expérimentations pour
réaliser un
contrôle de
trajectoire par déplacement
latéral du centre de
gravité, idée
d'ailleurs reprise par
Honda au début
des années 80 (cf brevet US 4 703 824,
déposé le 16 mai
1984, illustration de
droite)...
|
|
|

|
|
|
|
|
|
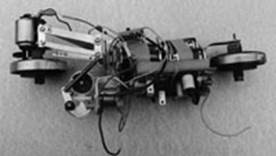
....le
projet Pulsar a réellement démarré avec cette maquette radio-commandée
qui, immédiatement, a révélé tout le potentiel du concept.
|

|
|

|
|
|
|
|
|
|
|